車載ネットワーク(IVN)は、現代の自動車機能のバックボーンを形成しています。IVNは、先進運転支援システム(ADAS)、インフォテインメント・システム、カメラ、車車間通信システム、電波レーダーや光検出のLiDARを含むリモート・センシング技術などの高度な機能に必要なデータの流れを促進しています。
10 Base-T1Sとは
これほど多くの自動車部品を調整することは非常に困難であり、すべての部品がさまざまな市場のコンプライアンス基準に適合していることを保証することはできません。 10 Base T1S 車載イーサネット・ネットワーキング技術は自動車などのノイズや電磁波の多い環境で10Mbpsの速度でデータを伝送するために特別に設計されたツイストペアケーブルで、この課題を軽減します。
10 Base-T1Sという名前はイーサネット・テクノロジーが、シングル・ペア環境用のベースバンド信号を使って、どうやってシングル・チャンネルでのデータ伝送を容易にするかを表しています。
もちろん、この新しい10 Base-T1Sが発表されたということは自動車メーカーがCAN/CAN-FDの次に新しい規格を守らないといけないということです。幸いなことに、ローデ・シュワルツのテクノロジー・マネージャーであるカーティス・ドナヒューとGRLのグローバル・オートモーティブ・ディレクターであるライナー・エッケルトが、10base-T1S準拠について知っておくべきことをこの記事にまとめました。
車載イーサネットと自律走行車
自動車の自律性と相互接続性が高まるにつれて、自動車領域はますますソフトウェアで定義されるようになってきています。専門家は、2030年までに自動車が「レベル5の自律性」と呼ばれるものを達成し、乗員が自分の目や手を使う代わりに自動車システムに完全に頼って周囲の状況を監視できるようになるとさえ予測しています。
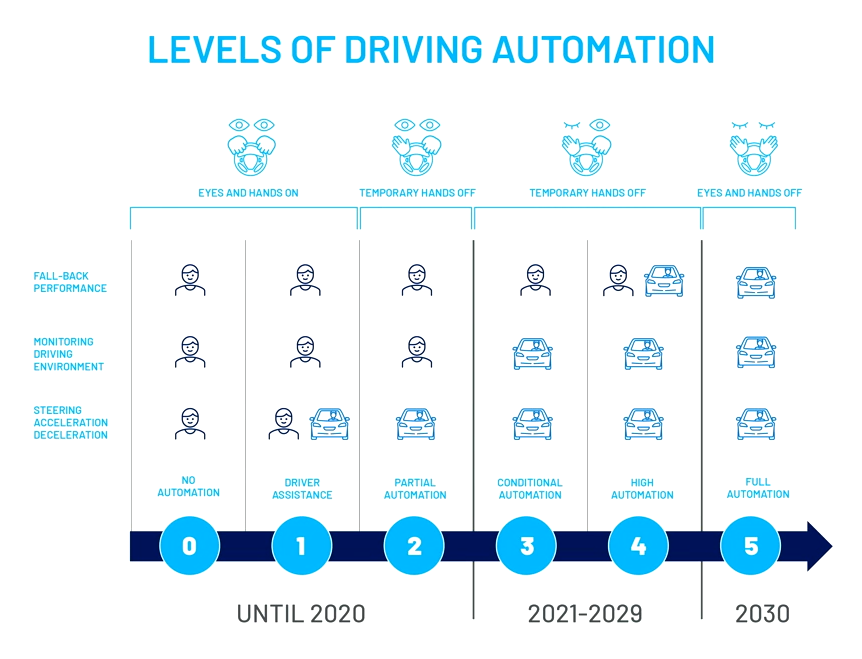
自動運転のレベルは、レベル1の自動化なしから
レベル5の完全自動化まで
最新のIVNアーキテクチャ
もちろん、このようなシステム・アーキテクチャを実現するためには、メーカーが事実上フールプルーフなモニタリングとフォールバック・システムを設計する必要があります。不可能に聞こえるかもしれませんが、自動車業界は、従来の自動車から現在のACES(自動運転、コネクテッド、電動、共有)定義の自動車まで、長い道のりを歩んできました。最新の自動車のIVNは、複雑なセンサーから送られてくるデータを保護し転送するために必要な、より高いレベルの計算能力とデータスループットをすでに備えています。同時に、IVNのハードウェアも高度化し、消費電力と重量効率が最適化されています。
改善されたIVNアーキテクチャの特徴の一つはドメイン集中型のフォーマットに向かっている独立したECU(Electric Control Unit:電気制御ユニット)です。ドメイン集中型のデザインは車をレベル3の自主性の達成に成功し、運転手がシステムに運転を任せれるようになりました。
なぜ10 Base-T1Sが作られたのか
10Base-T1Sは最初2000年代初頭から2010年にかけて行われ、100BaseTXはバスやスイッチのアクセサリーとともに登場しました。100 Base-TXがUSBポートやインフォテインメント・システムが車載環境に組み込まれるのをメーカーが初めて見ました。それ以来、車載イーサネットは車載システムのネットワーキングの大半を占め、複雑化する車載エコシステム内で相乗効果を高めるため、高いビットレートと低いビットレートの両方を導入しています。
自律走行車の市場のポテンシャル
技術の向上によって、お客様の要求も増してきます。今では自動車業界のお客様の半分以上(64%)が自動運転のためにOEMに変えたいと主張しています。アメリカのお客様の66%もシェアード・モビリティとキーレス自動車を基本条件としています。2030年には95%の新しく売られる自動車は相互接続であることが予想されています。ヨーロッパではその年には53%は電気自動車であることも計画されたいます。
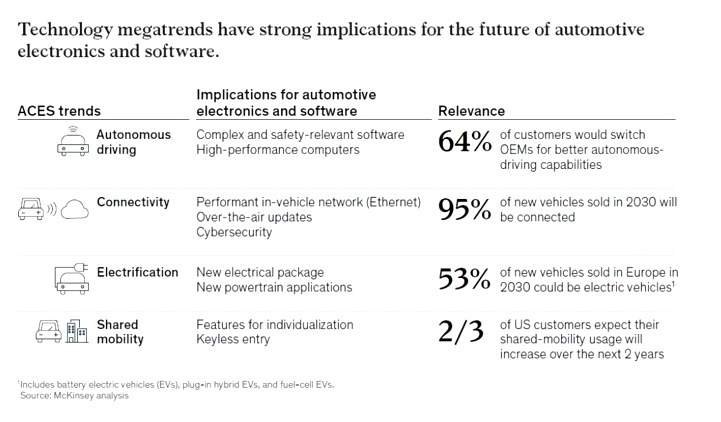
参考文献: McKinsey analysis
10 Base-T1sの技術的な概要
2019年に批准された10 Base-T1Sは、IEEEの最新の車載仕様のひとつである。一番速い車載仕様ではないが、10 Base-T1Sはメーカーのスピード、コストとシステミック・シナジーのバランスをとることに適しています。
他の車載仕様はパルス振幅変調(PAM)信号を使っていますが、10 Base-T1Sは複雑さとコストを軽減するために差動マンチェスター符号化(DME)を使っています。さらに、10 Base-T1Sはポイント・トゥ・ポイントおよびマルチドロップをサポートし、標準的なスイッチ・トポロジーまたはCANで知られるようなシングル・バスが可能です。マルチドロップ機能は25メートルまでのチャンネルと8ノードまで対応しています。10Base-T1Sには、IEEE車載仕様の中ではマルチドロップ機能を促進するために、PLCAと呼ばれる調整サブ機能が含まれています。
PAM vs DME
10 Base-T1SのDMEシグナルのメリットはPAMに比べてコストが低いことです。DMEの0-1レベル間の遷移は、PAMよりもはるかに頻繁に発生するため、クロックの回復が早く、結果として製品の低コスト化につながります。
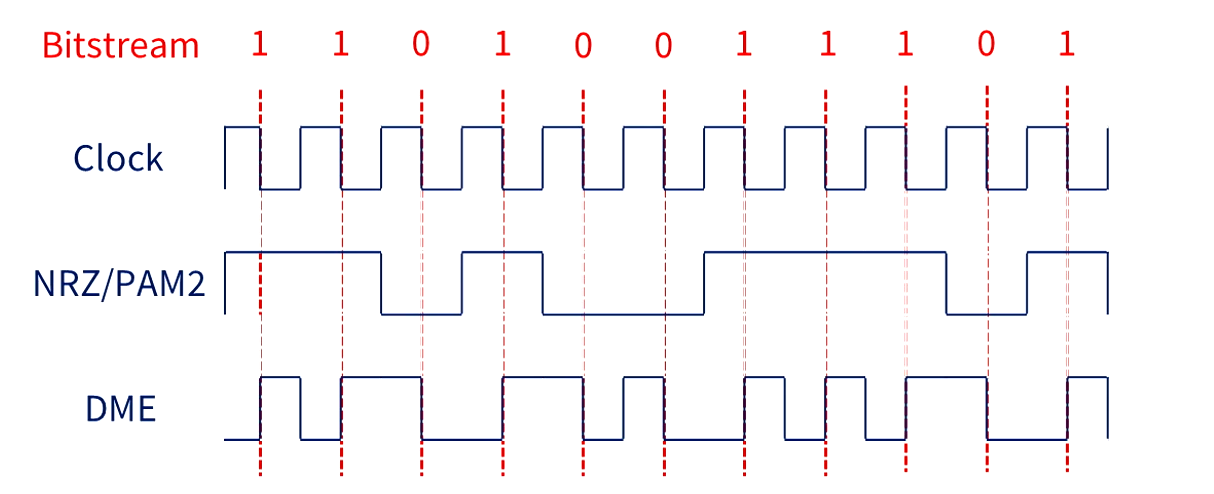
Sample bitstream demonstrating the frequency of transitions between 0 and 1 levels between DME and NRZ/PAM2.
マルチドロップ・トポロジー
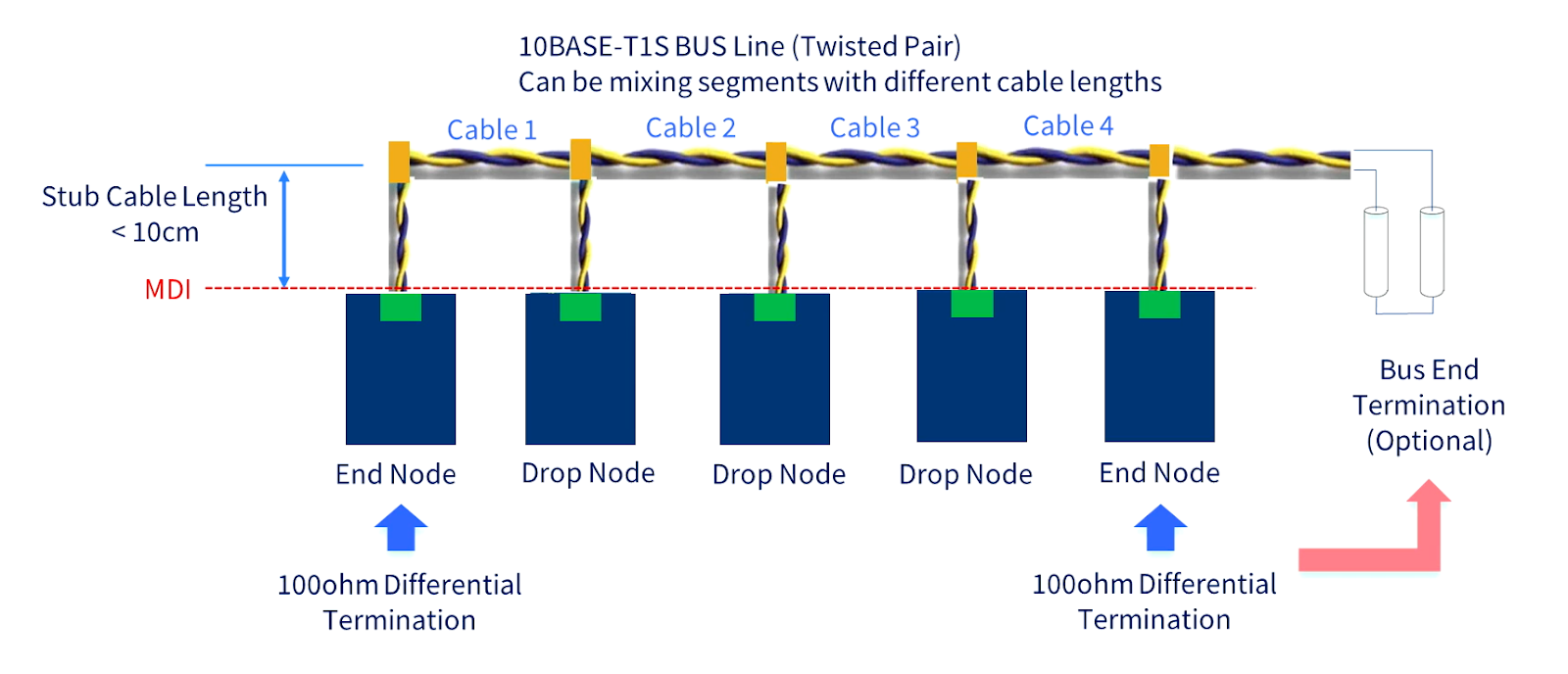
10 Base-T1Sは、複数のデバイスを同じチャネルに接続できるミキシング・セグメントを備えています。エンド・ノード・デバイス(100Ω)とドロップ・ノード(50Ω)の間の差動抵抗は、デバイスが非常に近いタイミングで同じチャネル上で通信することを可能です。
別のセットアップとしては100Ωのエンド・ノードとケーブルの代わりに100Ωインピーダンスのシングル終端を使用することで、同じ効果を得ることができます。
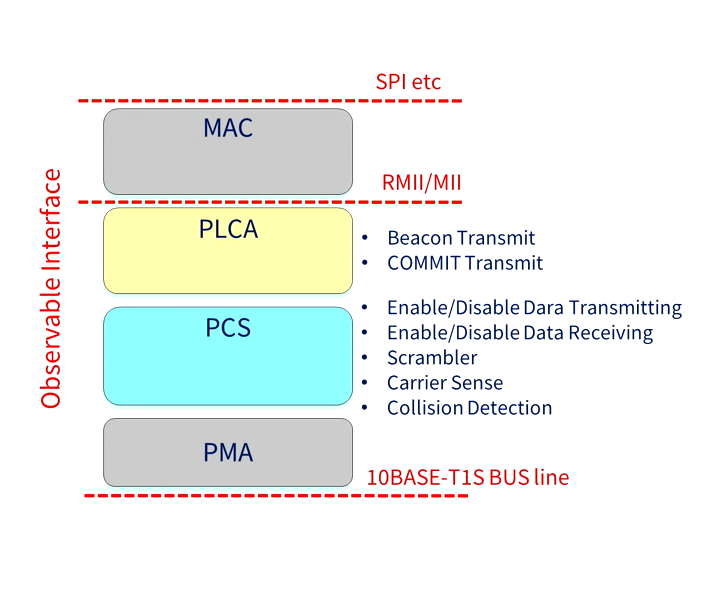
Physical layer collision avoidance (PLCA)
従来のイーサネットは、単一のMAC-Phy通信を定義するポイント・ツー・ポイント・アーキテクチャが主流であったため、新しい10Base-T1Sでは、事前に定義されたMACを使用しながら、マルチドロップモードでのバス通信も可能であり、この場合、和解サブレイヤはPCSとMACの間に入る必要があります。これにより、各デバイスはBEACONを送信することができ、このBEACONはデバイスの送信順序を決定し、最終的に衝突を回避するために使用されます。
10BASET1-Sの用途と使用例
10BASE-T1S vs 100/1000BASE-T1 vs Legacy IVNs
10 Base-T1Sは100/1000 Base-T1とレガシーIVNの間の早過ぎず遅過ぎず、ちょうど良いという意味で知られています。10 Base-T1Sはコストを低く保ちながら、レガシーネットワークの古いバージョンよりも早くデータを転送できるマルチドロップアーキテクチャに対応しています。しかし、CAN-FDとCAN XLもそれぞれ8MBitと20MBitの速度に達していることに留意しなければならないです。
これと比較すると、100/1000 Base-T1などの先行する車載技術は、はるかに高い帯域幅を持つPAM信号やスイッチに実装されたセンサーやアクティベータを使用しており、高性能だが、高コストでもありました。一方、CAN、CAN FD、FlexrayのようなレガシーIVNは、後にイーサーネットに採用されたマルチドロップアーキテクチャを採用し、低コストでありながら、データレートも低くなっています。CANと後のイーサネット・バージョンの主な違いは、前者がBUSへのアービトレーションにaddr/prioを使用したのに対し、後者は精密なタイムスロットのために定義された「BEACON」を得たことであります。
ゾーン・アーキテクチャ

ゾーン・アーキテクチャは、SoC(System on a Chip)デバイスへの高速アップリンクを持つゾーン・スマート・スイッチ、または複数のSoCを接続する高速スイッチで構成されます。そこから、100/1000 Base-T1高速センサーやアクチュエーター、低速センサーやデバイス用の10 Base-T1Sへのポイント・ツー・ポイント接続がある。従来のサブネットワークとは対照的に、すべての通信はイーサネット(TCP/IP、SOME/IP)をベースにしており、SDVの拡張が容易になっています。
10 Base-T1Sコンプライアンス・テスト仕様
適合性と安定性を保障するために10 Base-T1Sをどうやってテストするかを知ることが大事です。このためエンジニアは、複数のテストステーションでスケーラブルかつ再現可能な方法で、定義された環境内でマルチドロップ技術を再現する必要があります。
PMAテスト仕様
以下の画像は、BUSのセットアップを示しています。マルチドロップとBUSセグメントは多くのノイズを発生させ、その結果テストが複雑になってしまいます。GRLはTC14グループと共同で、BUSデバイスを一つのセットアップに限定しつつ、実際のBUS.s.で同じ環境を再現できるリンギング回路基板を開発しました。
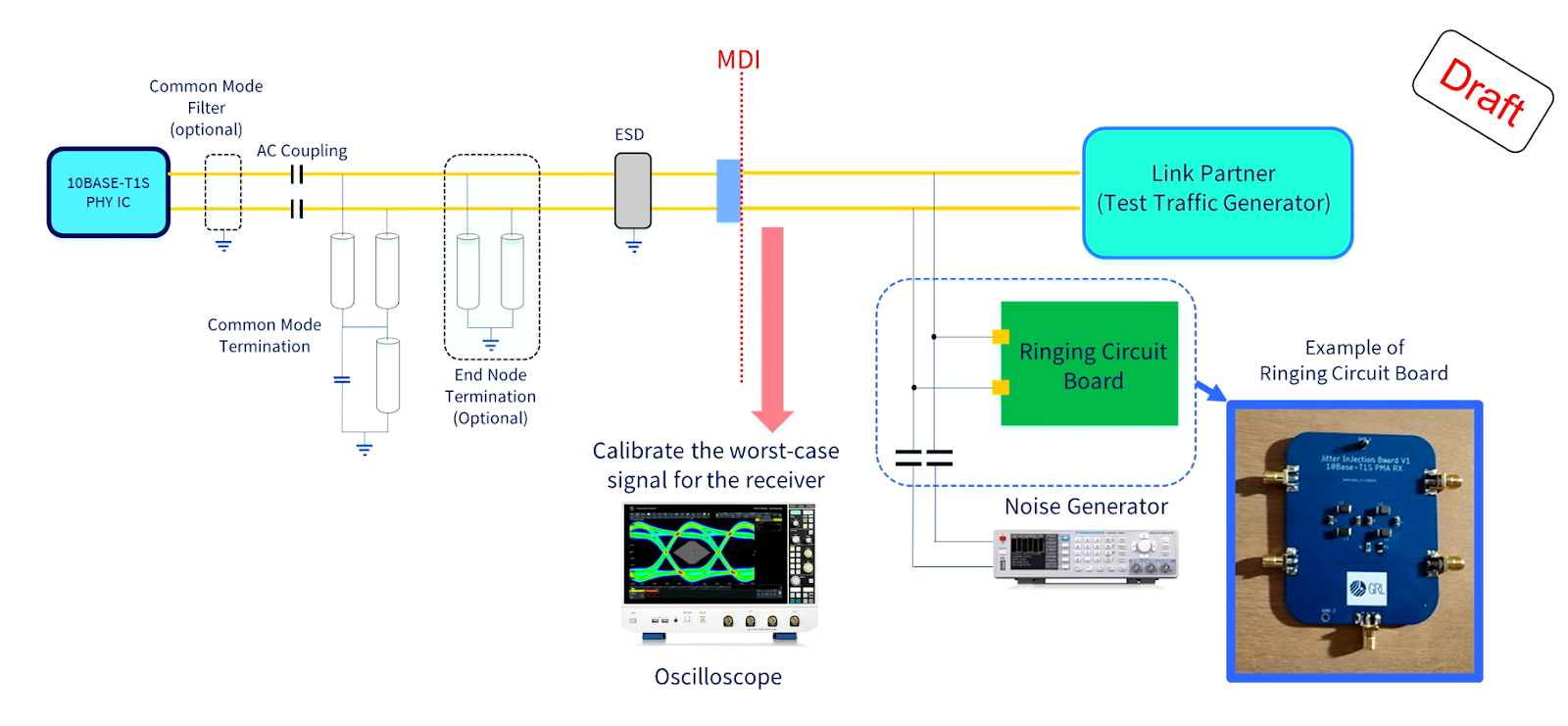
さらに一歩進んで、実際のBUSシナリオをエミュレートするためにGRLはTC14チームと協力し、オシロスコープの最も正確な校正設定とパラメータを解明しました。詳細はウェビナーのデモでご覧いただけます。
Watch the full webinar and 10BASE-T1S demonstration

PMA RXキャリブレーション
ストレス信号がエミュレートされるRX側では、BUSセットアップ、リンギングボード、周波数ジェネレーターにより、さまざまなレベルのジッターを作り出すことができます。これによって、信号のノイズ振幅が増加したときにBUSがどのように動くかがわかります。
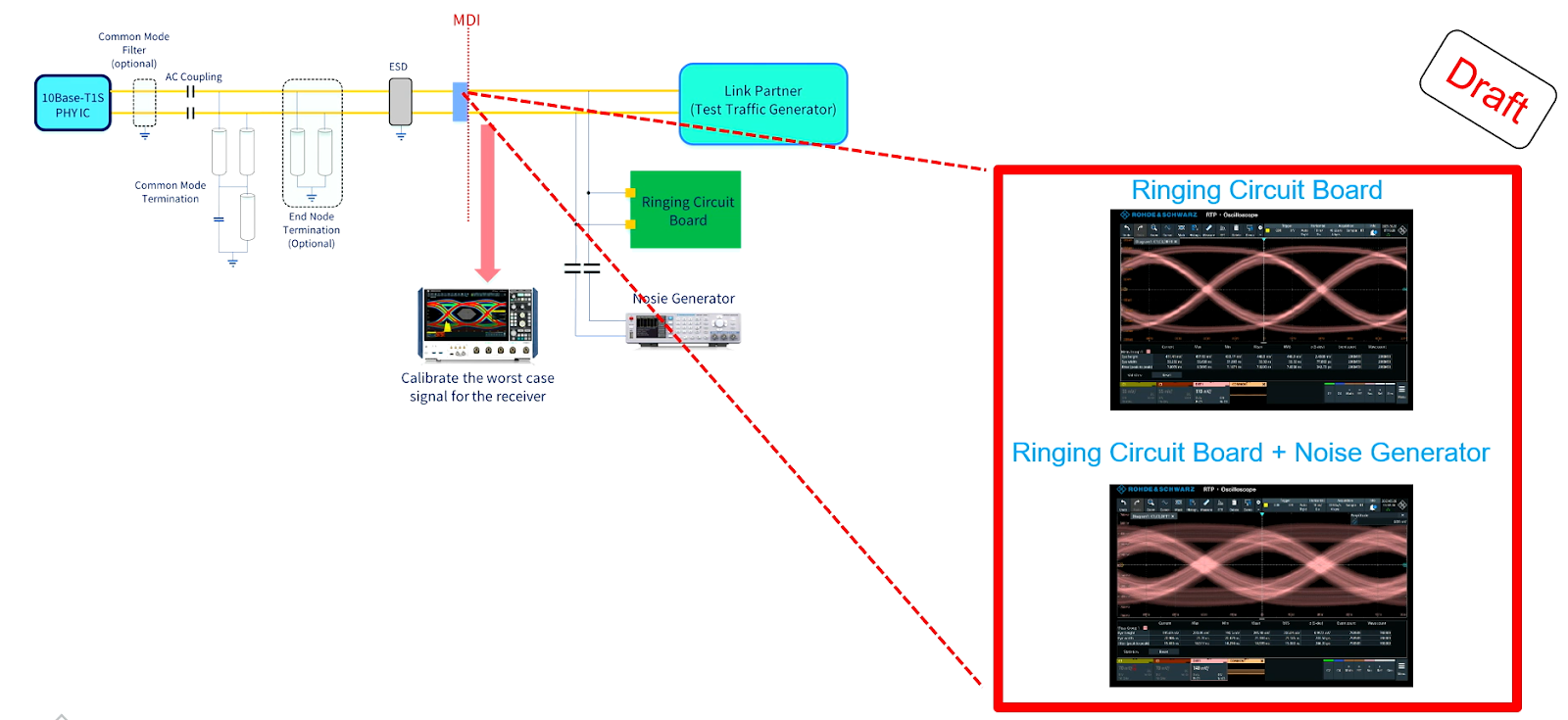
通常、リンク・パートナーはテスト・モード3で使用され、信号ノイズの振幅を変化させることで、ジッターがどのように影響されるかがわかる。最終的な値、測定の流れ、コンプライアンス検証はOPEN Alliance TC14で進行中です。
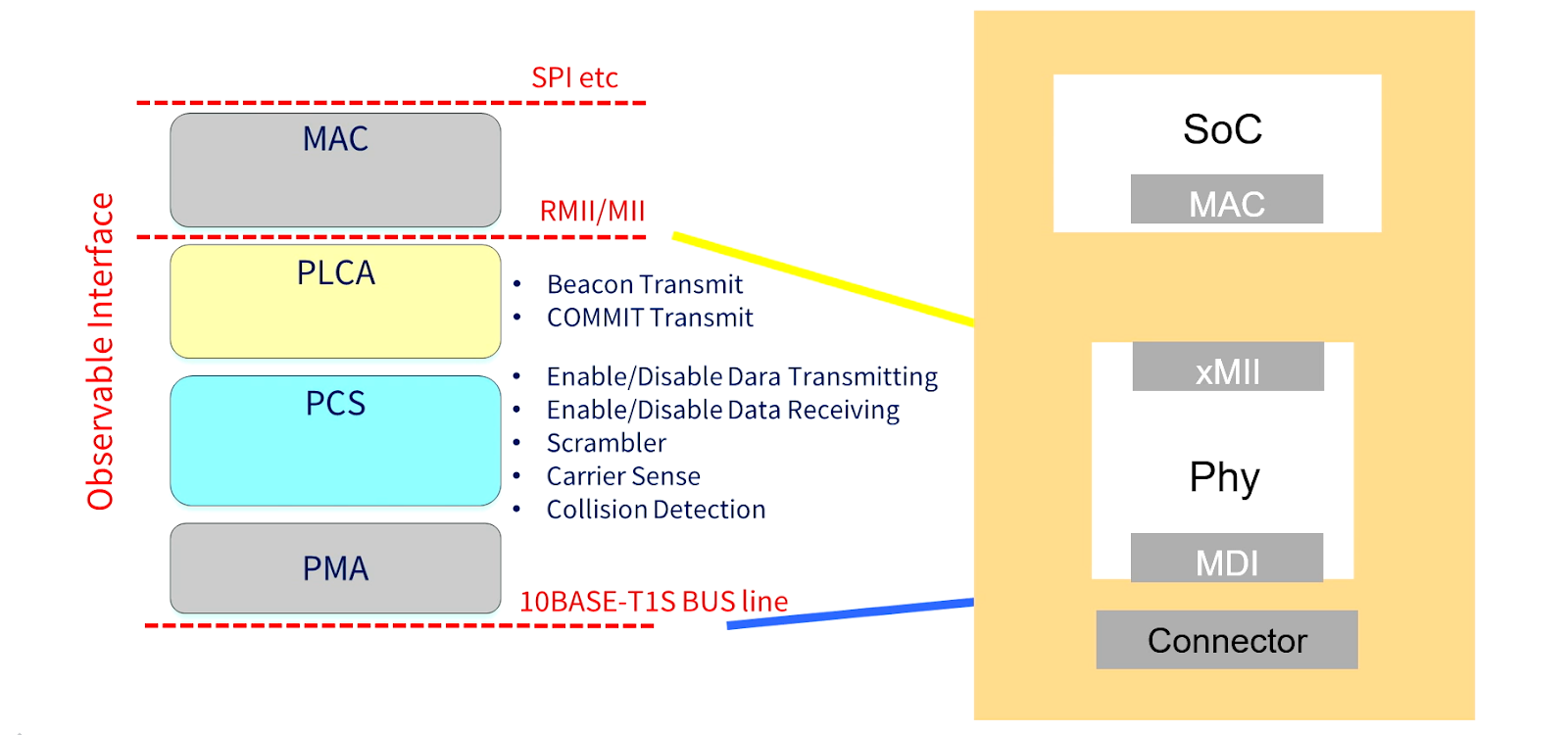
PCS/PLCAテスト仕様
PCS/PLCAテスト仕様はPhyの中間部分を扱っており、SoCのメソッドフェーズからのエンコードと転送に影響し、デジタル側からいくつかのデータを送り込みます。10Base-T1Sは100/1000Base-T1と比較して、2つのレイヤーに対応しています。標準Base-T1ではPCSレイヤーのみがエンコードとフロントエンドへの転送を行うが、10Base-T1SではPLCAレイヤーがBUSインターフェースを実現し、定義された転送のために各ノードでトラフィック・ウィンドウ用のBECONを生成します。
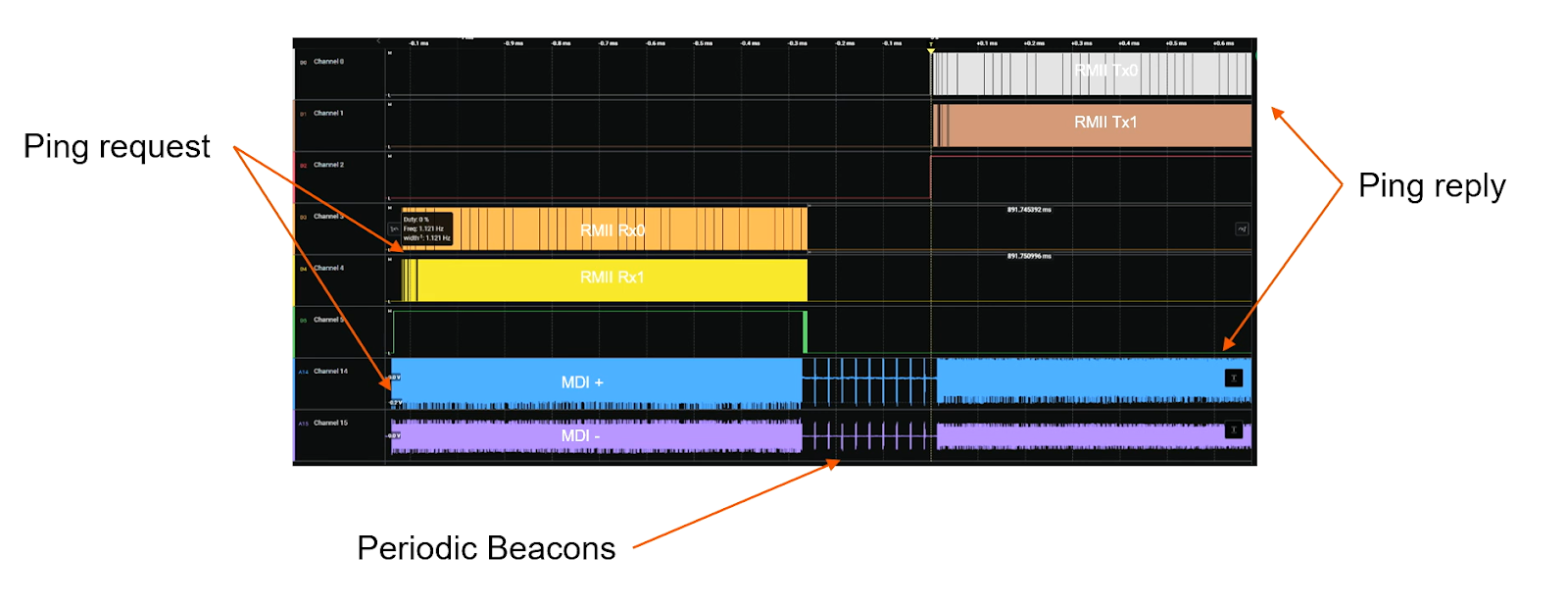
PINGリクエストを例にすると、MDI は物理的な側でデータが入ってくるところを表しています。この後、信号が反対側のRMIIインターフェイスに移動するまでの短い遅延が続きます。
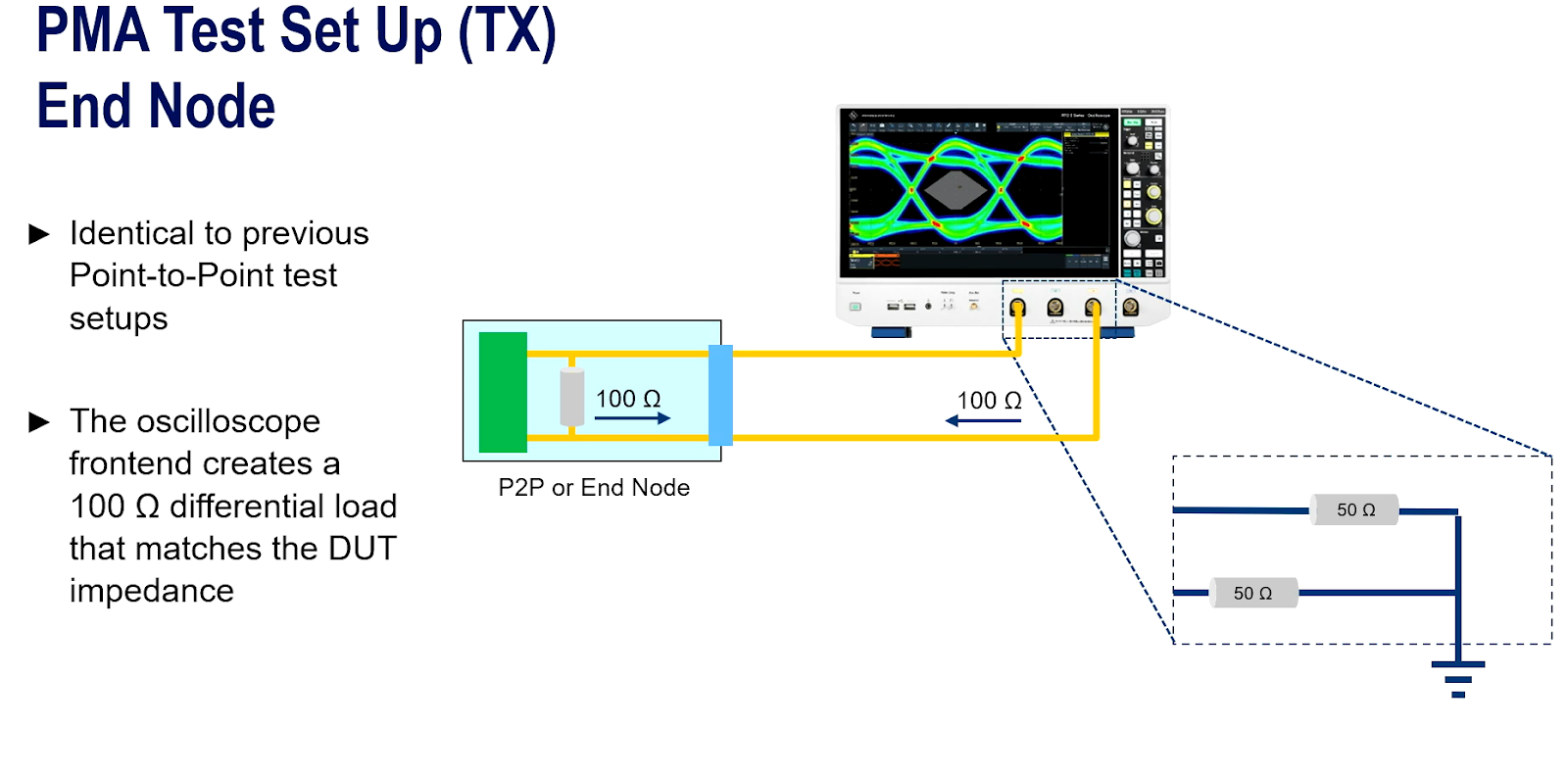
PMAテスト・セットアップ(TX)
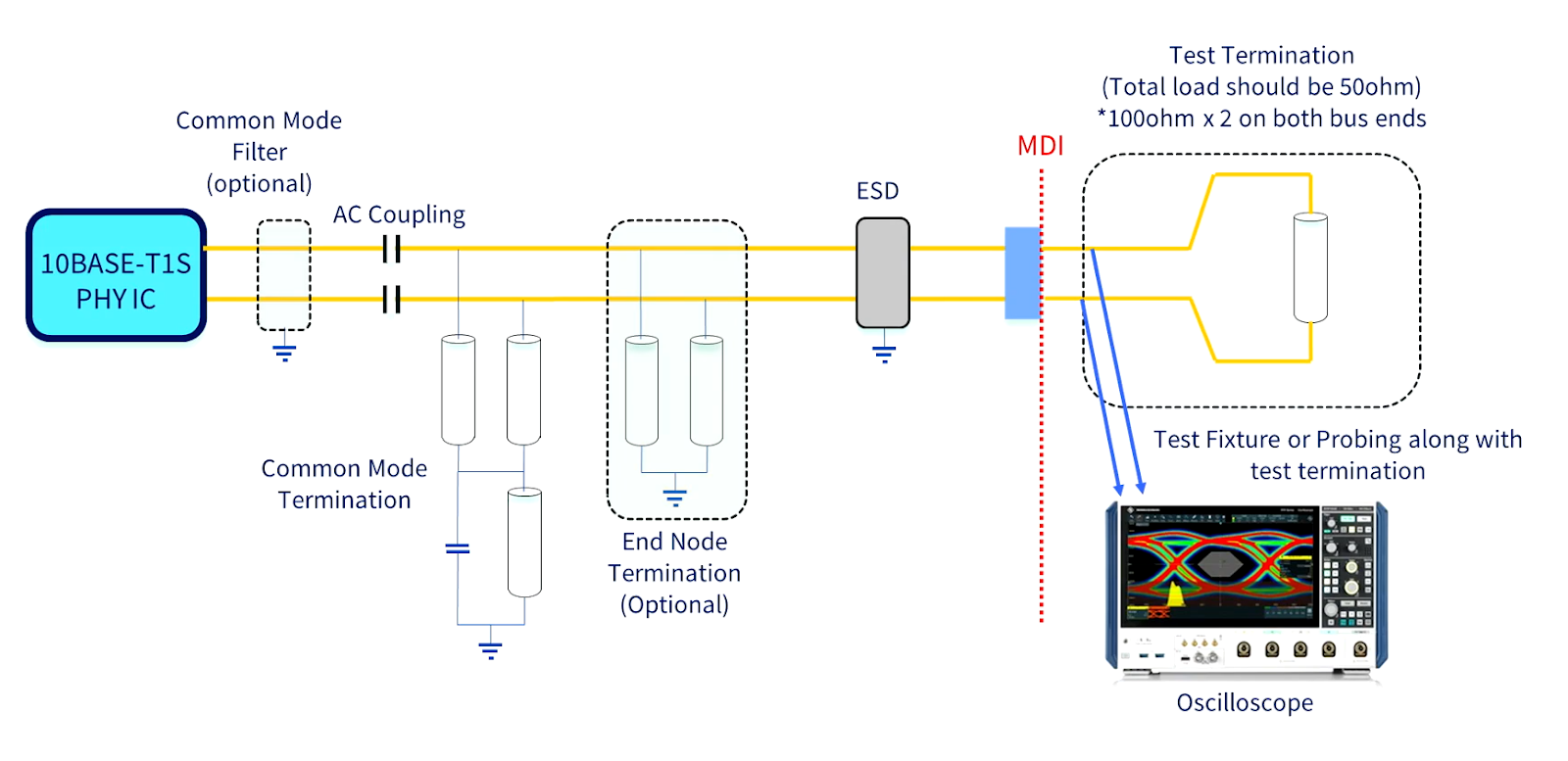
マルチドロップセグメントでは、100Ωのインピーダンスを持つ2つのエンドノードがあります。このシナリオでは、ひとつのドロップノードは送信モード(50Ω)で、もう一つは受信モード(高インピーダンス)です。一つが送信しているとき、もう一つは沈黙しており、シグナリングの反射を効果的に低減しています。
これは100/1000 Base-T1と他のイーサーネット技術と同じような仕組みです。
ポイント・ツー・ポイントのデバイスをドロップ・ノードに置き換えると、テスト・セットアップに50Ωと100Ωのミスマッチが生じます。これは、PMAテストケースに両方の構成について測定することを要求しているIEEE仕様に反します。
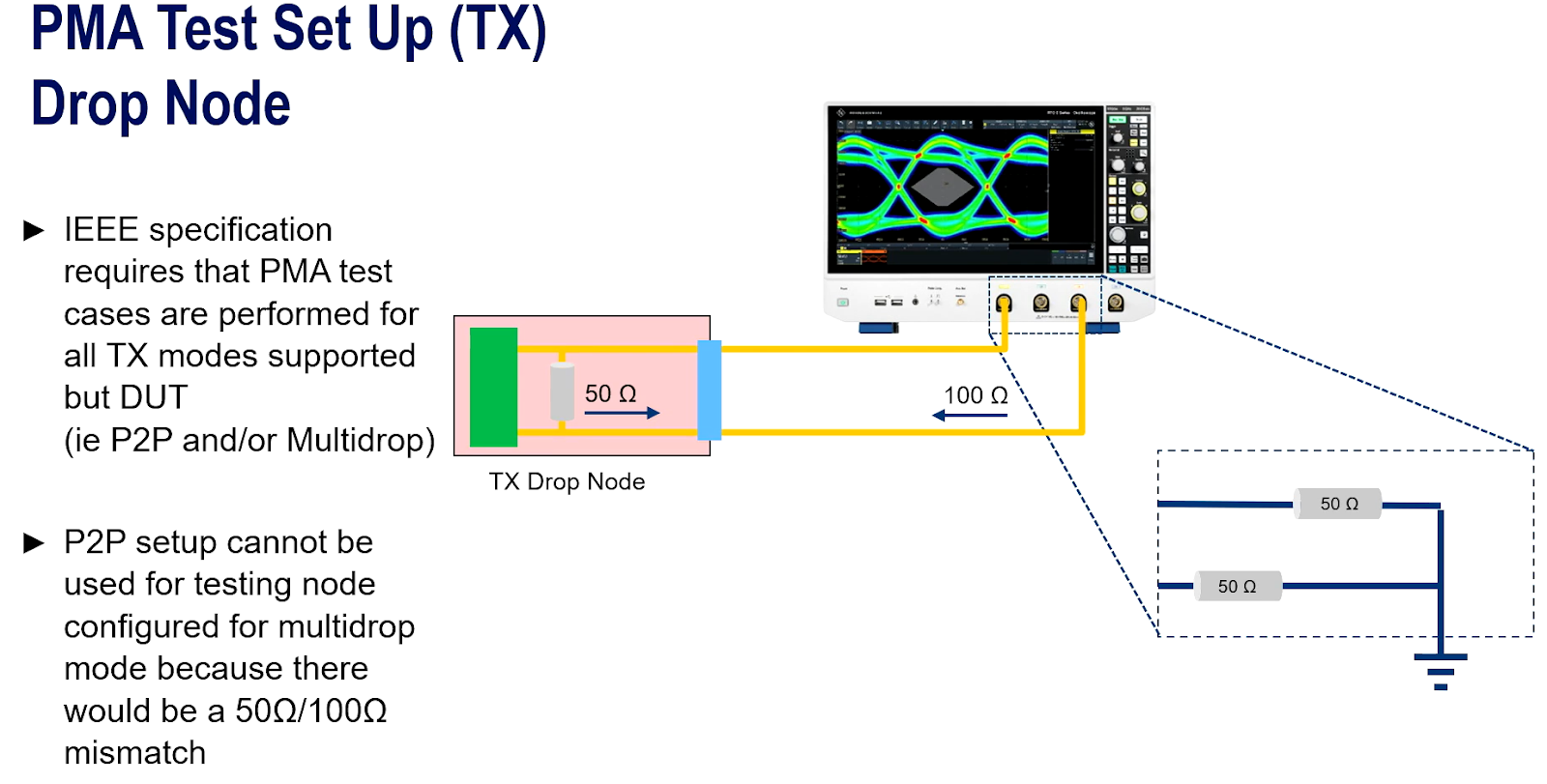
50Ωデバイスの特性はどのように測定するのか?マルチドロップの例では、ポイント・ツー・ポイントのエンド・ノードと送信ドロップ・ノードがオシロスコープ上のリンクの反対側に100Ωのライン終端を作ります。この100Ωは実際にはオシロスコープとドロップノードまたは被試験デバイスとの間に存在します。
これにはジッターと振幅が含まれ、テスト用治具で実装したり、追加のインピーダンスに対応するためにオプションでPCBにハードウェアの修正を加えたりすることができます。

コネクテッド車とコンプライアンス車を新市場に投入
GRLは効率的な認証プロセスに必要なICベンダーとティア1サプライヤーと繋げ、10/100/1000 Base-T1Sのための包括的な車載イーサネット試験サービスを提供しています。10 Base-T1Sのデモを見て、当社のデモを予約しましょう。
筆者について
ライナー・エッケルトはGRLの車載イーサネット、PCIe、SerDes、USBなどの高速インターフェース向けテストサービスおよびソリューションの拡大に貢献しています。以前はNXP社でフィールドアプリケーションエンジニア、FibreCode GmbH社でゼネラルマネージャー、SMSC/Microchip社でMOSTツールポートフォリオ担当ディレクターを務めていました。